一、概述
SLAM:即时定位与地图构建,Simultaneous Location And Mapping,也称为CML (Current Mapping and Localization)。分开来看就是两个部分:
- 定位部分,主要是依据周围图像,提取图像特征点(或光流法),依据图像差异计算轨迹,以确定自身位置。
- 建图部分,通过自身回环轨迹,不断更新当前地图和全局地图,最终以点云形式,计算出周边环境轮廓地图。
开源框架Orb-Slam3是典型的以图像特征点法为主的slam计算框架,基于此可以评估不同光照条件、不同相机、不同外部环境、不同曝光、不同图像等各种因素对于传感器运动轨迹的影响。
对于仅基于图像的slam定位建图算法来说,获取到的图像质量对于计算精度和准确率的影响是极为重要的(尤其在没有附加惯性测量单元(imu)或外部GPS定位的条件下)。同时也可以看到,不同相机的帧率/曝光方式/相机性质/相机标定的内外参…,所带来的差异影响也是非常大的。
本文分为三个部分:
1.卷帘曝光相机(Rolling-Shutter)和全局曝光相机(Global-Shutter)对比
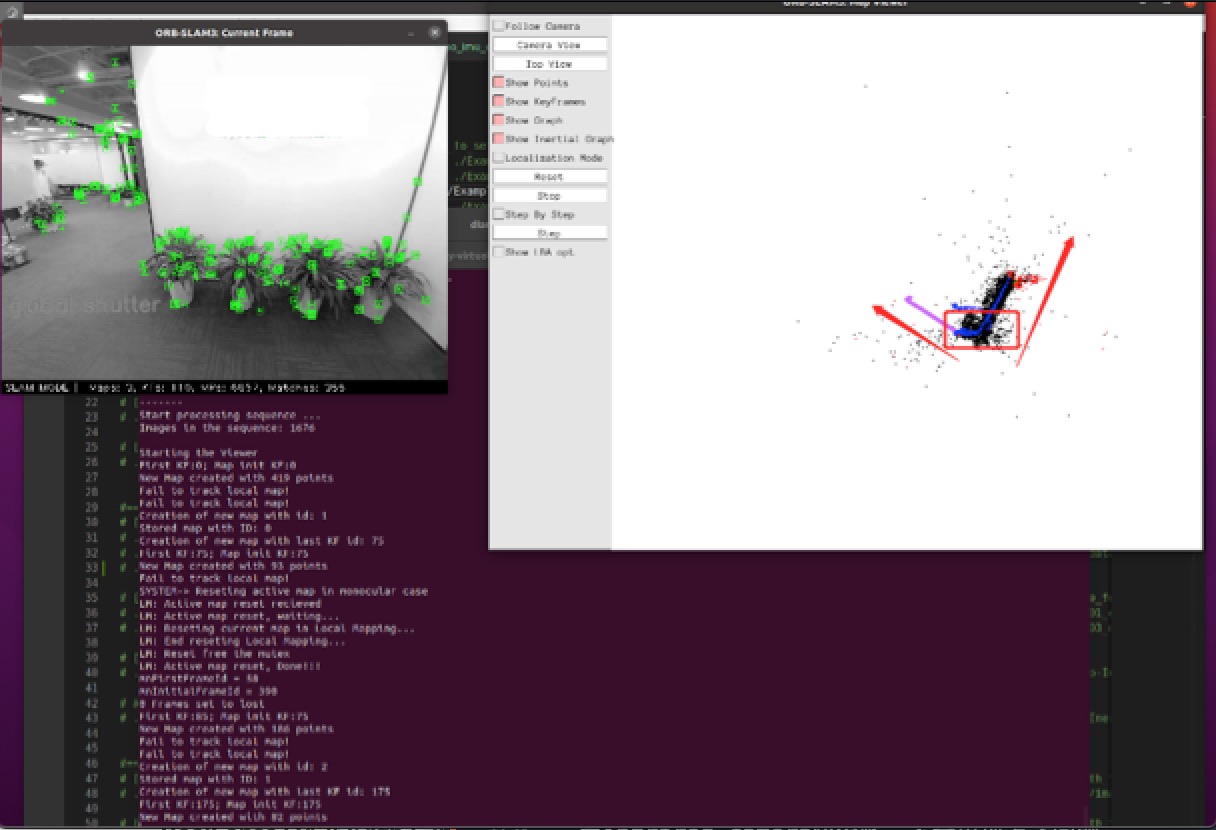
global shutter:全局曝光,感光元件的所有像素点同时曝光一定时间,进而成像。没有Rolling Shutter的“果冻现象”。曝光时间比Rolling Shutter短,曝光整帧后输出像素数据。
rolling shutter:卷帘曝光,感光元件的所有像素点逐行轮流曝光一定时间,进而成像。会出现“果冻现象”。曝光时间比Global Shutter长,但是曝光一行输出一行。
2.RealSense D435i的彩色相机(rgb-camera)和红外相机(infrared-camera)对比
RealSense 是立体视觉深度相机,集成了2个红外传感器(IR Stereo Camera)、1个红外激光发射器(IR Projector)、1个彩色相机(Color Camera)。IntelRealSense D435i提供完整深度相机模块,集成视觉处理器、立体深度模块、RGB传感器、彩色图像信号处理模块。深度模块采用立体视觉的左右成像器、可选红外激光发射器、 RGB色彩传感器。
3.RealSense D455的彩色相机(rgb-camera)和红外相机(infrared-camera)对比
RealSense D455和RealSense D435i其实本质差异不太大,除了相机摄像头分布位置、摄像头内外参等。
二、Rolling-Shutter & Global-Shutter相机轨迹评估
1.实验设备
Global Shutter相机 (2M)
Rolling Shutter相机 (630)
2.实验方法
两个摄像头同时固定设备,沿相同轨迹移动一段时间后,得到视频。两个相机运动轨迹近乎重合,有细微差别。预处理视频后,得到帧图像数据集(室内indoor/室外outdoor/走廊slides),标注为TUM数据集格式,定位建图框架运行环境为Orb-Slam3,按关键帧提取图像特征点,得到的轨迹文件KeyFrameTrajectory.txt,为运动位姿数据,包含:时间戳timestamp、6dof位姿数据(xyz和rpy)。
参照轨迹Ground Truth为global shutter轨迹,rolling shutter相对于global shutter的。
3.轨迹实验
3.1.openCV录制视频
openCV直接调起“pc摄像头”或“usb外接摄像头”录制数据。openCV读视频原理:其实就是不停地拍照,不停地写入到一个文件。视频本身也是由一张一张照片组成的。部分代码如下:
3.2.实验视频 (点击自动播放)
(1) 室内(indoor)
(2) 室外(outdoor)
(3) 走廊(slides)
3.3.视频制作数据集
将视频以一定帧率采样,得到每帧图像,加上时间戳(timestamp),用作Orb-Slam3系统的输入。常见的输入格式有TUM、EuRoC,此处以TUM为例,用openCV将视频mp4文件转换为TUM格式数据集。
mp4提取图片帧,保存为TUM的“rgb文件夹”和“rgb.txt”。部分代码片如下:
3.4.相机标定
标定得到实际相机内外参(fx,fy,cx,cy)、相机转移参数(T_c1_c0)、畸变参数(distortion_coeffs),写入Orb-Slam3参数配置文件cam0/1-camchain.yaml。
相机标定部分内容比较多,从搭建ros标定环境、到标定工具Kalibr使用、相机内外参+imu标定,详见另外本系列另外博客《相机标定》。用到的工具:Kalibr工具imu+camera联合标定。
3.5.Slam计算
修改配置文件中的相机内外参(ps:相机参数需要自行先标定好),Orb-Slam3计算轨迹,得到轨迹文件FrameTrajectory.txt。
4.评估指标
轨迹、绝对位姿误差、相对位姿误差。
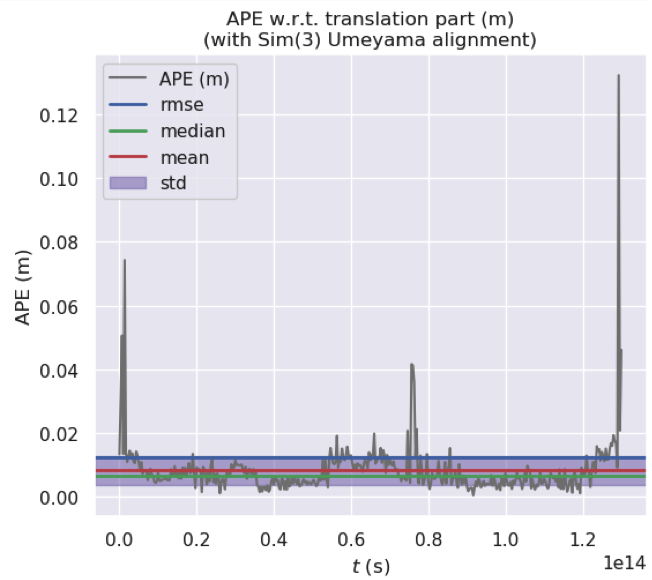
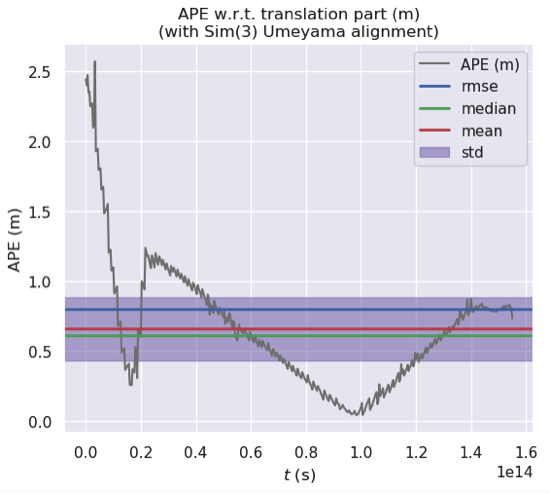
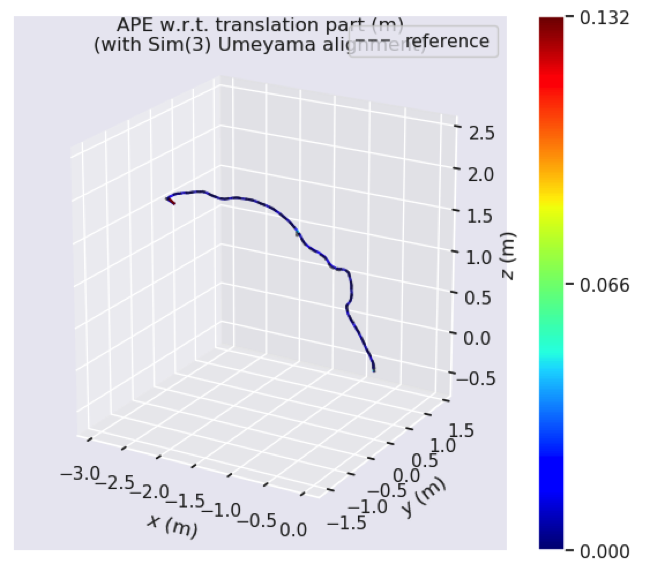
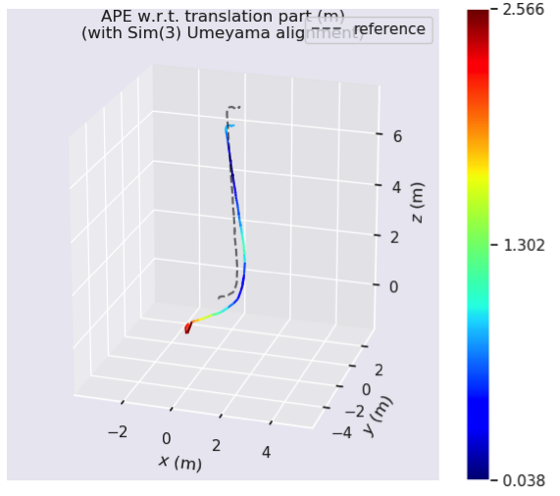
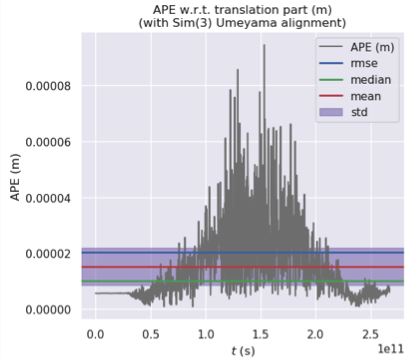
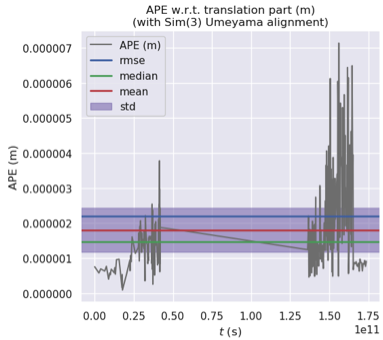
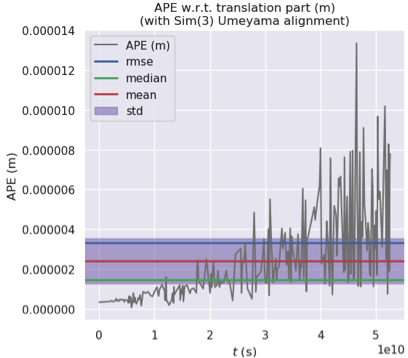
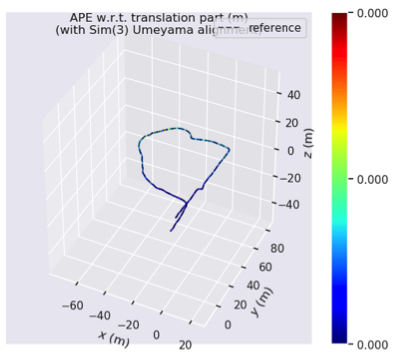
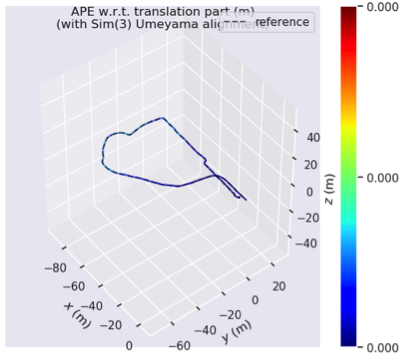
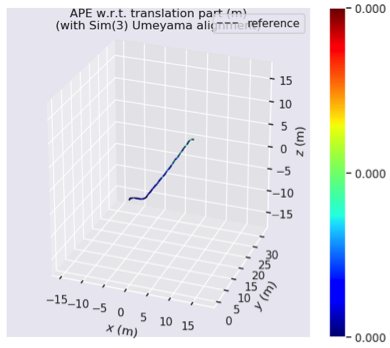
Ape: 绝对位姿误差,APE w.r.t. translation part (m), (with Sim(3) Umeyama alignment)。估计轨迹全局一致性,比较被估计值和真值轨迹之间的绝对距离。针对所有时刻定义平移分量的 均方根误差(RMSE)和方差(SSE)。
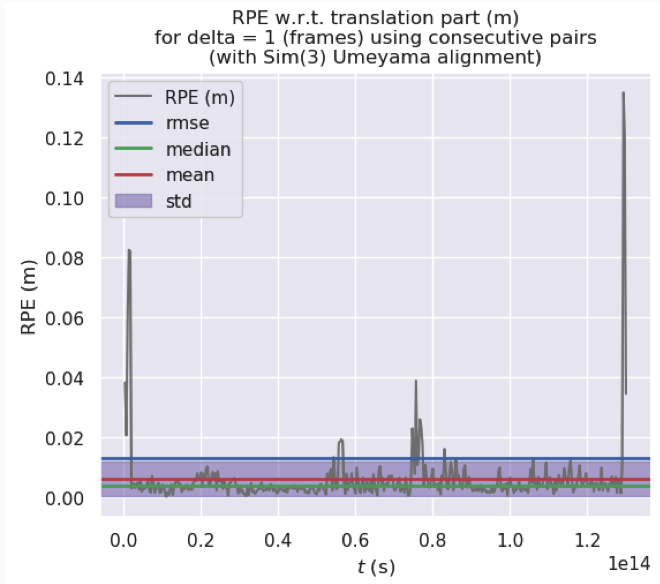
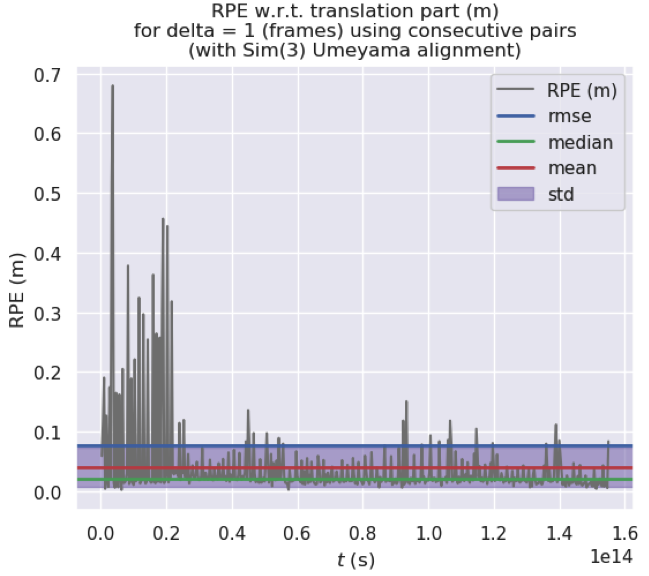
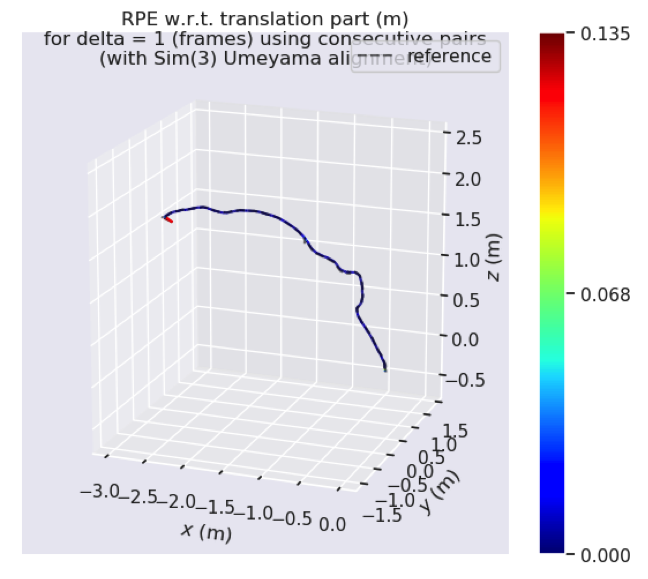
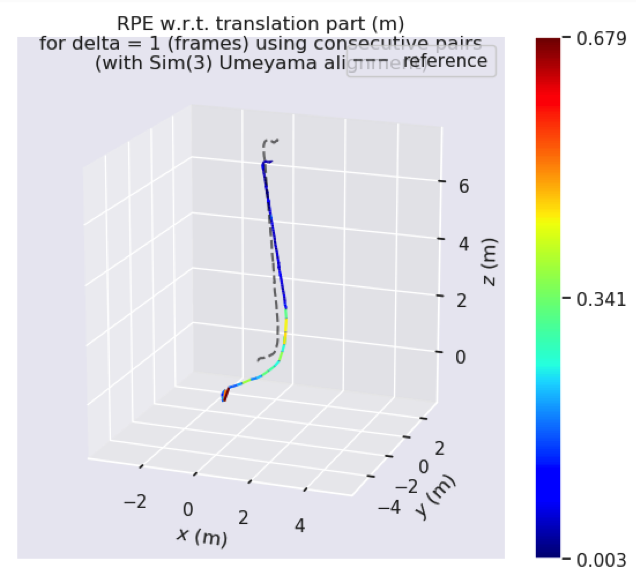
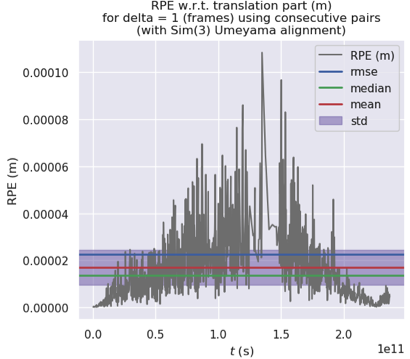
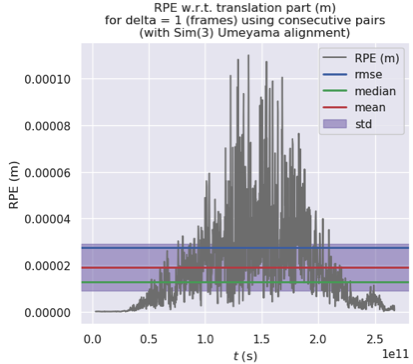
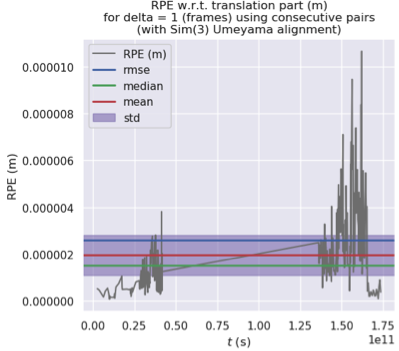
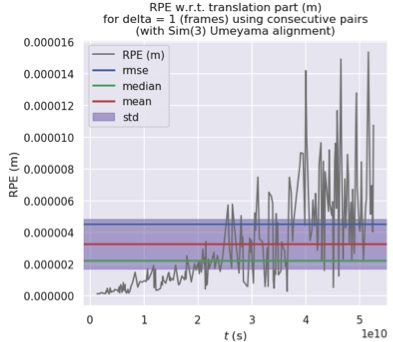
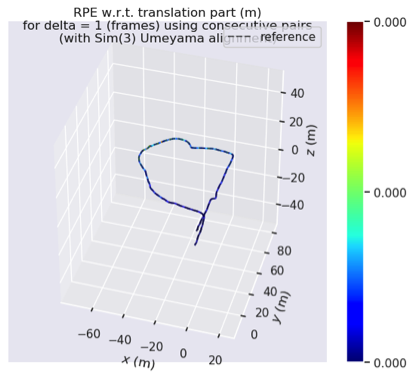
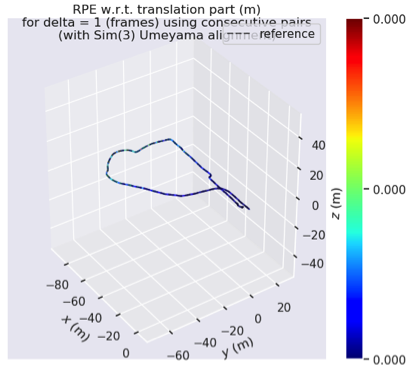
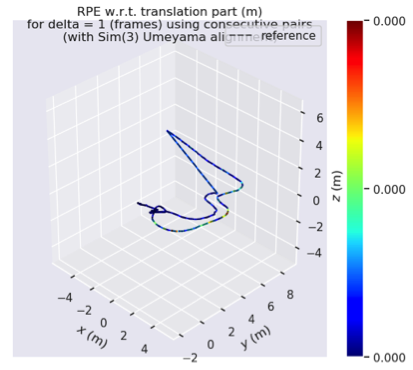
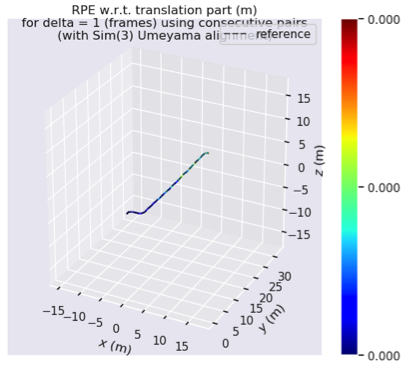
Rpe: 相对位姿误差,RPE w.r.t. translation part (m), (with Sim(3) Umeyama alignment), for delta = 1 (frames) using consecutive pairs。测量轨迹在固定时间区间Δt内的局部准确度。对应轨迹的漂移,计算相隔固定时间差Δ两帧位姿差。
各指标信息汇总对比如下:
| Scene | Traj-Info |
|---|---|
| 室内(Indoor) | name: f_dataset-indoor_rolling infos: 968 poses, 6.247m path length, 322333333330000.000s duration name: f_dataset-indoor_global infos: 986 poses, 5.679m path length, 328333333330000.000s duration |
| 室外(Outdoor) | name: f_dataset-outdoor_rolling infos: 391 poses, 0.695m path length, 130000000000000.000s duration name: f_dataset-outdoor_global infos: 696 poses, 1.511m path length, 231666666670000.000s duration |
| 走廊(Slides) | name: f_dataset-slides_rolling infos: 466 poses, 11.648m path length, 155000000000000.062s duration name: f_dataset-slides_global infos: 1455 poses, 40.405m path length, 494333333330000.062s duration |
各误差汇总对比如下:
| 指标 | 室内(indoor) | 室外(outdoor) | 走廊(slides) |
|---|---|---|---|
| APE | max: 0.374459 mean: 0.062394 median: 0.029402 min: 0.003393 rmse: 0.099173 sse: 9.520567 std: 0.077086 |
max: 0.132285 mean: 0.008305 median: 0.006561 min: 0.000379 rmse: 0.012343 sse: 0.059569 std: 0.009131 |
max: 2.565694 mean: 0.654031 median: 0.608664 min: 0.038379 rmse: 0.792056 sse: 292.346650 std: 0.446762 |
| RPE | max: 0.104738 mean: 0.005775 median: 0.003462 min: 0.000161 rmse: 0.010518 sse: 0.106973 std: 0.008790 |
max: 0.135044 mean: 0.006286 median: 0.004057 min: 0.000303 rmse: 0.013238 sse: 0.068347 std: 0.011650 |
max: 0.679385 mean: 0.040339 median: 0.020645 min: 0.002755 rmse: 0.077982 sse: 2.827775 std: 0.066738 |
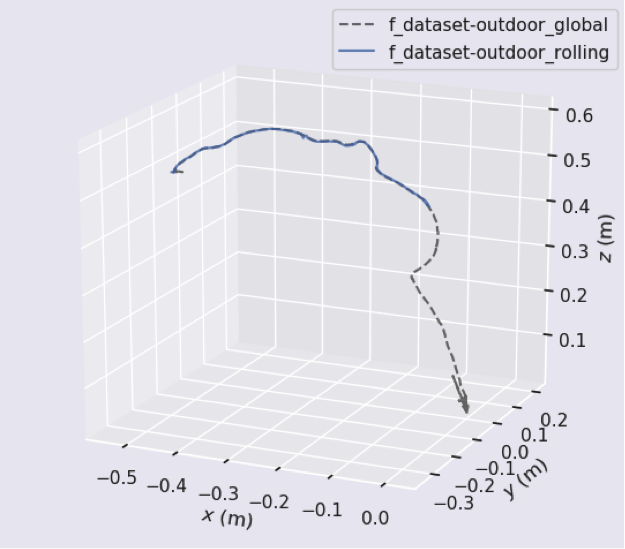
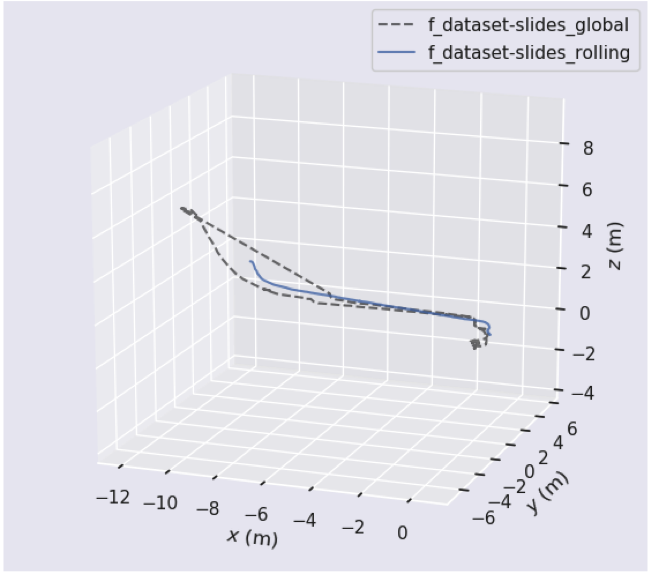
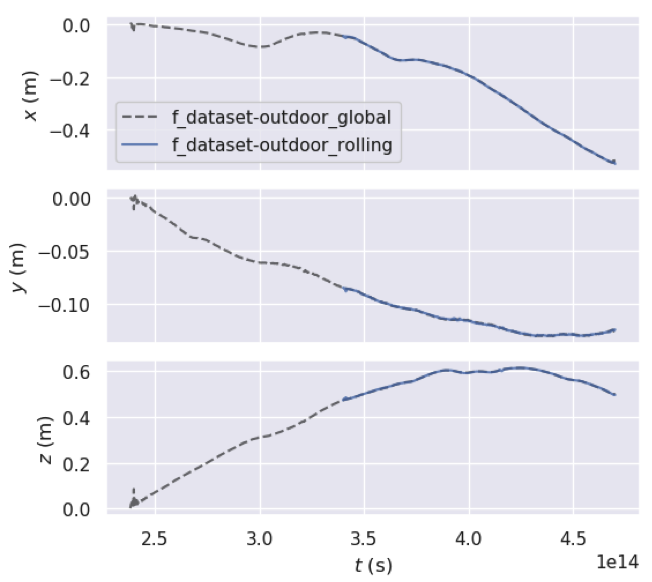
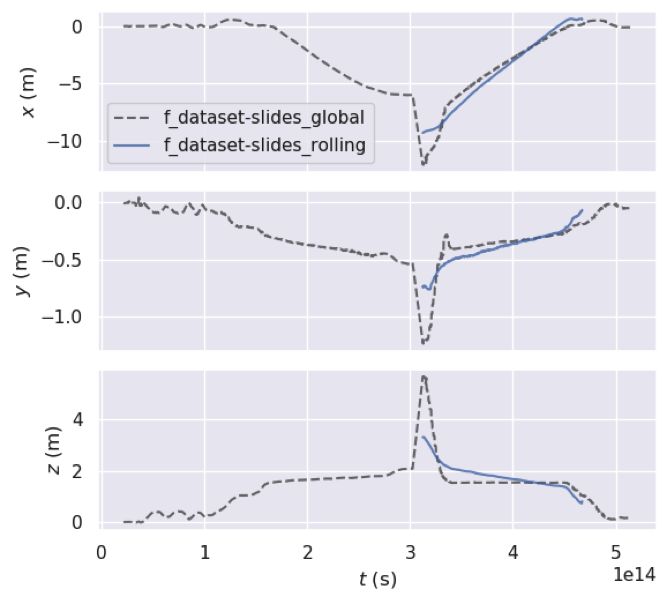
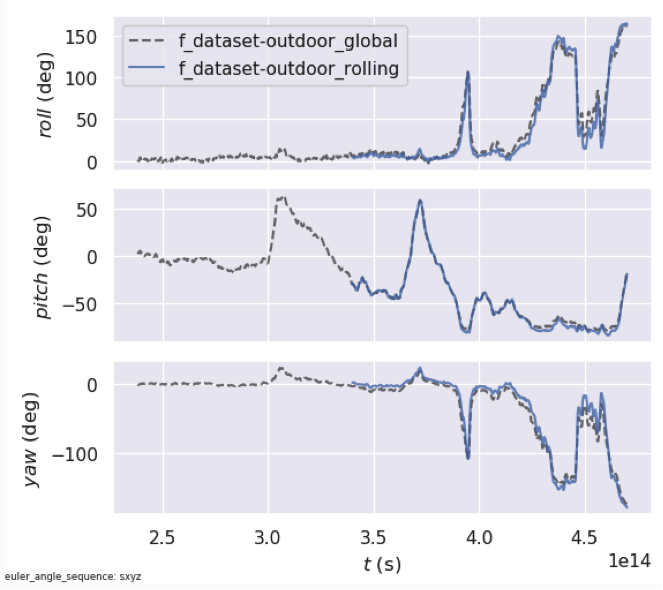
各轨迹图统计汇总对比如下:(点击查看大图)
| 指标 | 室内(indoor) | 室外(outdoor) | 走廊(slides) |
|---|---|---|---|
| Trajectory | 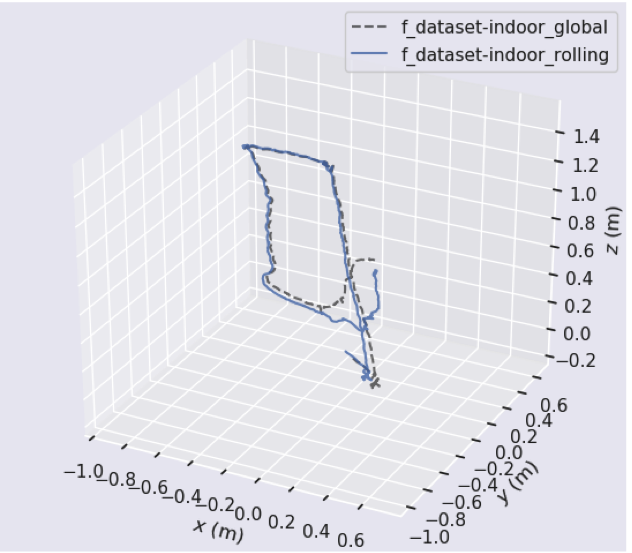 |
 |
 |
| xyz_view | 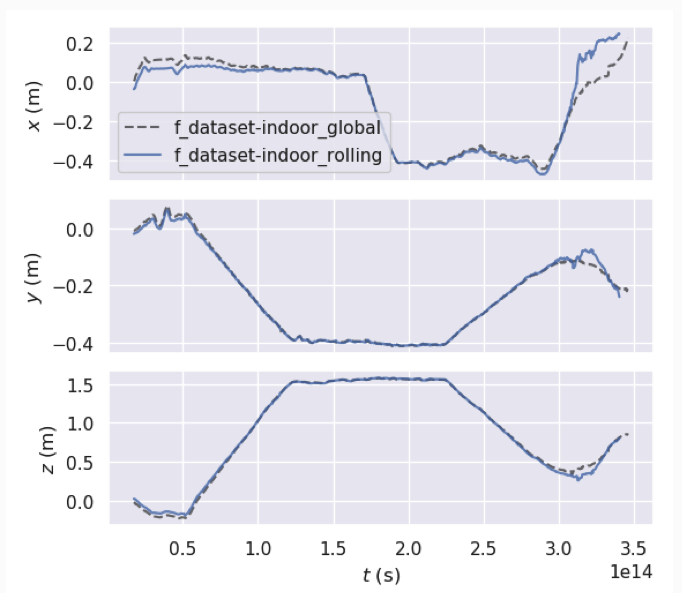 |
 |
 |
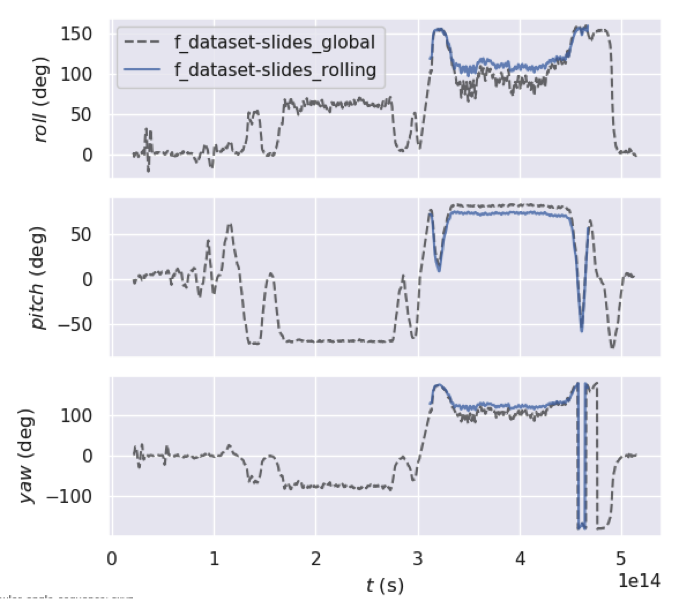
| rpy_view | 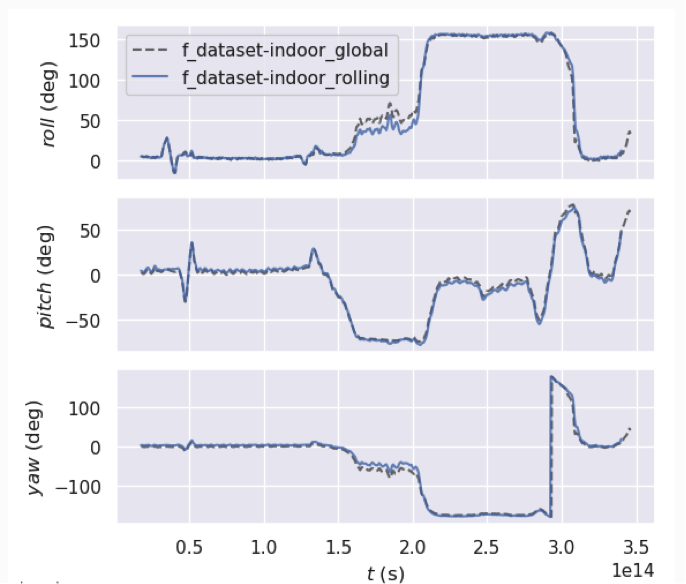 |
 |
 |
| APE | 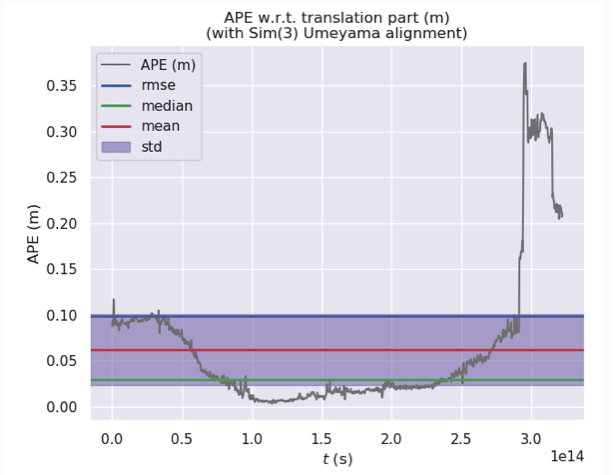 |
 |
 |
| APE-Map | 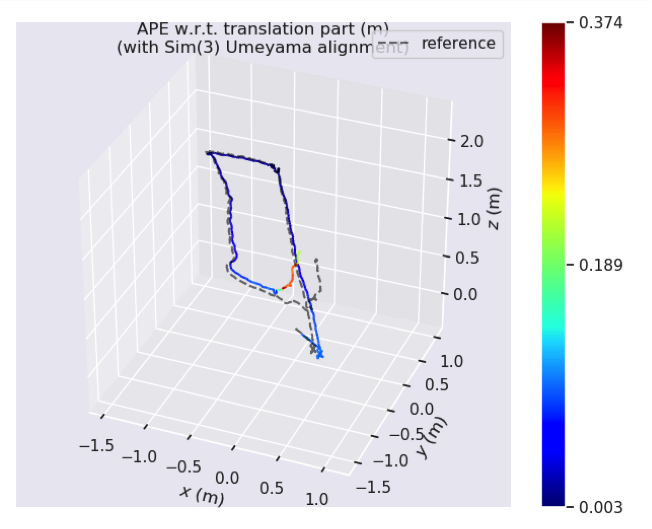 |
 |
 |
| RPE | 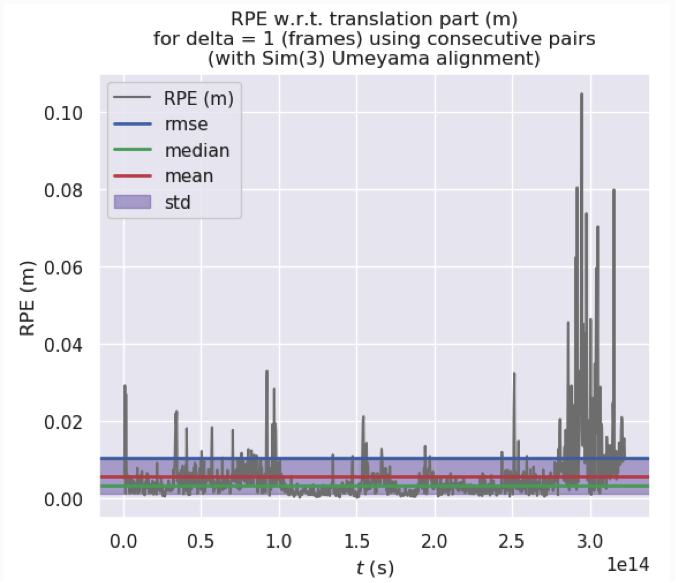 |
 |
 |
| RPE-Map | 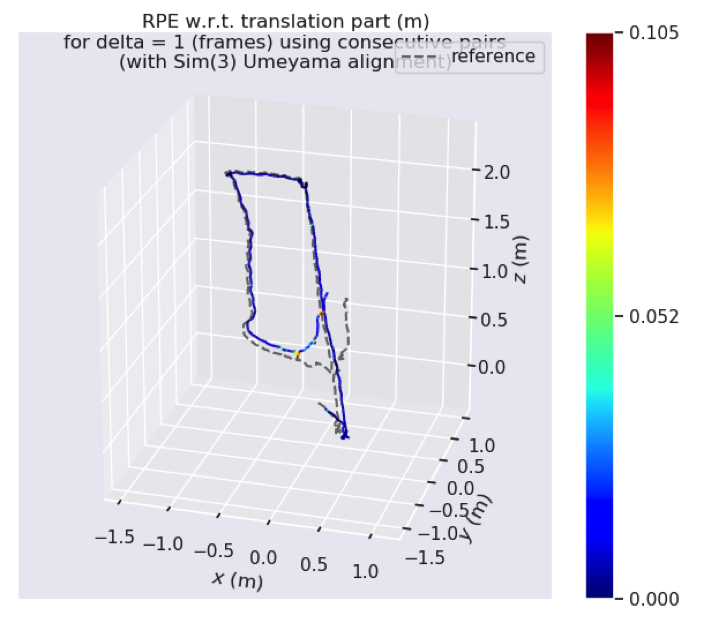 |
 |
 |
5.结论
1.Orb-Slam3完全是基于图像特征点(ORB)的方法。
- 在特定光照、参照物明确的情景下,轨迹完整,误差也较小。
- 在图像过于相似(走廊往返)、光照过于强烈(室外)的情况,会存在轨迹跳跃不连续现象。
2.图像变化过快的情形,导致特征点提取过慢或丢失部分特征点,会出现跑数据时的帧卡顿现象,对Altas地图集localMap构建和地图合并有影响。
 |
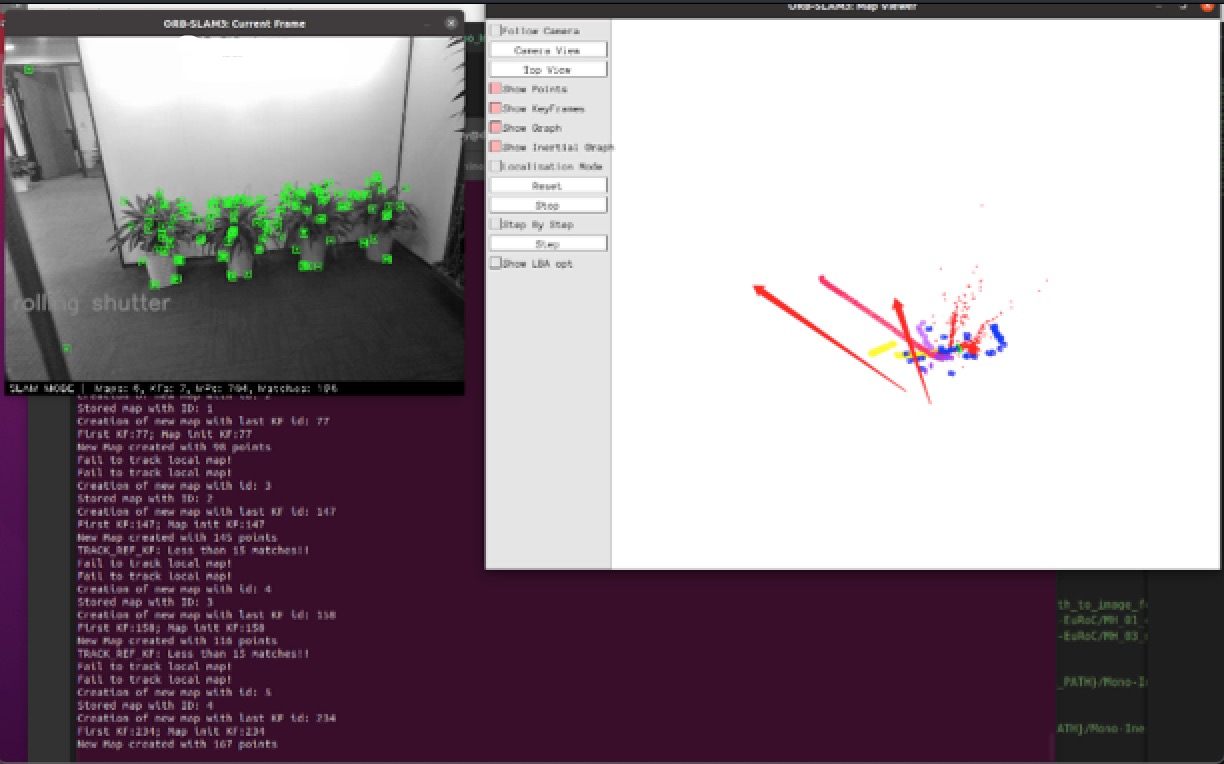 |
如上图所示,走廊实验中的现象,当沿着走廊尽头翻转180°走回来时,Orb-Slam3系统会因为图像过于相似(走廊顺向/逆向)而分辨不清,于是定位建图时直接跳回原点开始重新建图,随机选定一个方向角度开始重新绘制轨迹,即出现红色箭头所示方向。
其本质原因是基于特征点法的slam算法本身存在的缺陷,当图像质量不清晰、或者图像中能检出的特征点十分有限,导致不能slam系统很好区分图像时,就没法定位了。
3.rolling shutter会存在轨迹不完全的情况(丢失轨迹),global shutter则不会存在。
- 轨迹重叠度:室内>室外>走廊
- 在轨迹存在的部分,误差:走廊>室外>室内
此处详见上述“指标信息汇总对比”、“误差汇总对比”部分。
三、RealSense D435i: rgb & infrared-camera轨迹评估
1.实验设备
RealSense D435i: RGB-camera
RealSense D435i: Infrared-left-camera
2.实验方法
RealSense D435i的2个摄像头:rgb-camera, infrared_left-camera,分别单独沿重复轨迹,实时运行Orb-Slam3,场景为 (室内indoor/室外outdoor/走廊slides),得到轨迹文件KeyFrameTrajectory.txt和CameraTrajectory.txt,为各自运动位姿数据,包含:时间戳timestamp、6dof位姿数据(xyz和rpy)。
3.轨迹实验
3.1.相机驱动
RealSense深度相机系列,自带驱动调起摄像头,可实时录视频+slam定位建图,不是openCV录制预存离线数据集。
关于RealSense驱动安装+ros环境安装+配置&校准相机内外参+imu参数,详见RealSense官网。
- (1)realsense-sdk-2.0驱动安装:(下载链接见“参考文献”部分)
- (2)获取相机内外参数:读取配置写到自定义文件(config_D435i.yaml、config_D455.yaml),详见sdk源码:librealsense/tools/enumerate-devices/rs-enumerate-devices.cpp,可直接编译运行。
把Orb-Slam3配置文件中的相机参数, , , ,替换为相机配置的, , , 参数。
3.2.实验视频
如前所述,仍旧是:室内(indoor)、室外(outdoor)、走廊(slides)。此处不再给出实验视频。
3.3.相机标定
驱动RealSense SDK可以完成,一定注意保证相机参数的准确性。
3.4.实时slam计算
运行Orb-Slam3,计算轨迹+定位建图。
4.评估指标
轨迹、绝对位姿误差、相对位姿误差。
各指标信息汇总对比如下:
| Scene | Traj-Info | |
|---|---|---|
| Mono_IMU | Rgbd_IMU | |
| 室内(Indoor) | name: kf_dataset-monoi_realsense_d435i_indoor infos: 276 poses, 36.352m path length, 101989215488.000s duration name: f_dataset-monoi_realsense_d435i_indoor infos: 3152 poses, 42.172m path length, 105055297792.000s duration |
name: kf_dataset-rgbd_imu_realsense_d435i_indoor infos: 280 poses, 29.703m path length, 49206745088.000s duration name: f_dataset-rgbd_imu_realsense_d435i_indoor infos: 1587 poses, 37.269m path length, 52942709760.000s duration |
| 室外(Outdoor) | name: kf_dataset-monoi_realsense_d435i_outdoor infos: 1179 poses, 257.977m path length, 236662186496.000s duration name: f_dataset-monoi_realsense_d435i_outdoor infos: 7252 poses, 275.178m path length, 241763062528.000s duration |
name: kf_dataset-rgbd_imu_realsense_d435i_outdoor infos: 1230 poses, 267.810m path length, 267213810176.000s duration name: f_dataset-rgbd_imu_realsense_d435i_outdoor infos: 8166 poses, 381.485m path length, 272350868224.000s duration |
| 走廊(Slides) | name: kf_dataset-monoi_realsense_d435i_slides infos: 283 poses, 45.609m path length, 173703452160.000s duration name: f_dataset-monoi_realsense_d435i_slides infos: 2581 poses, 71.888m path length, 175361714176.000s duration |
name: kf_dataset-rgbd_imu_realsense_d435i_slides infos: 233 poses, 35.413m path length, 52588330496.000s duration name: f_dataset-rgbd_imu_realsense_d435i_slides infos: 1729 poses, 48.788m path length, 57625243904.000s duration |
各误差汇总对比如下:
| 指标 | 室内(indoor) | 室外(outdoor) | 走廊(slides) | |||
|---|---|---|---|---|---|---|
| Mono_IMU | Rgbd_IMU | Mono_IMU | Rgbd_IMU | Mono_IMU | Rgbd_IMU | |
| APE | max:0.000004 mean:0.000001 median:0.000001 min:0.000000 rmse:0.000001 sse:0.000000 std:0.000001 | max:0.000006 mean:0.000002 median:0.000001 min:0.000000 rmse:0.000002 sse:0.000000 std:0.000001 |
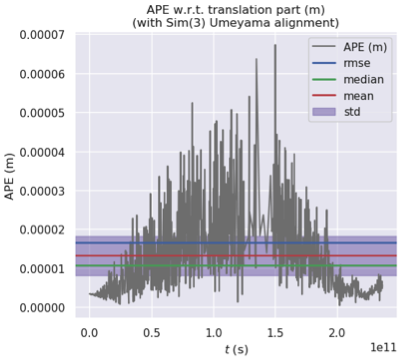
max:0.000067 mean:0.000013 median:0.000011 min:0.000000 rmse:0.000017 sse:0.000000 std:0.000010 | max:0.000094 mean:0.000015 median:0.000010 min:0.000001 rmse:0.000020 sse:0.000001 std:0.000013 |
max:0.000007 mean:0.000002 median:0.000001 min:0.000000 rmse:0.000002 sse:0.000000 std:0.000001 | max:0.000013 mean:0.000002 median:0.000001 min:0.000000 rmse:0.000003 sse:0.000000 std:0.000002 |
| RPE | max:0.000006 mean:0.000001 median:0.000001 min:0.000000 rmse:0.000002 sse:0.000000 std:0.000001 | max:0.000010 mean:0.000002 median:0.000002 min:0.000000 rmse:0.000003 sse:0.000000 std:0.000002 |
max:0.000108 mean:0.000017 median:0.000014 min:0.000000 rmse:0.000023 sse:0.000001 std:0.000015 | max:0.000110 mean:0.000019 median:0.000013 min:0.000000 rmse:0.000028 sse:0.000001 std:0.000020 |
max:0.000011 mean:0.000002 median:0.000002 min:0.000000 rmse:0.000003 sse:0.000000 std:0.000002 | max:0.000015 mean:0.000003 median:0.000002 min:0.000000 rmse:0.000004 sse:0.000000 std:0.000003 |
各轨迹图统计汇总对比如下:(点击查看大图)
| 指标 | 室内(indoor) | 室外(outdoor) | 走廊(slides) | |||
|---|---|---|---|---|---|---|
| Mono_IMU | Rgbd_IMU | Mono_IMU | Rgbd_IMU | Mono_IMU | Rgbd_IMU | |
| Trajectory | 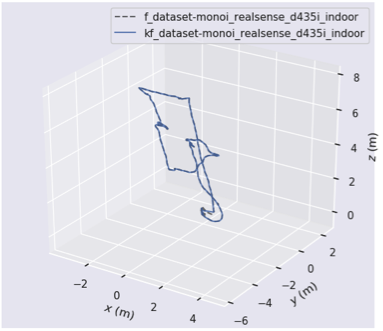 | 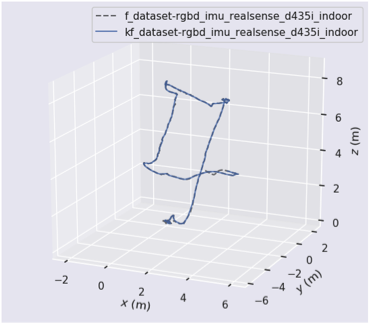 |
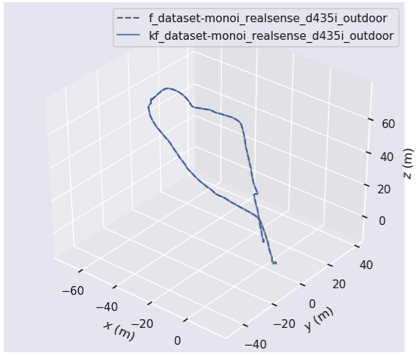 | 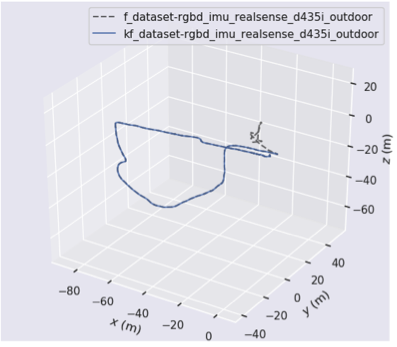 |
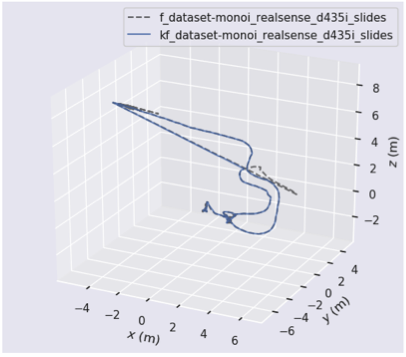 | 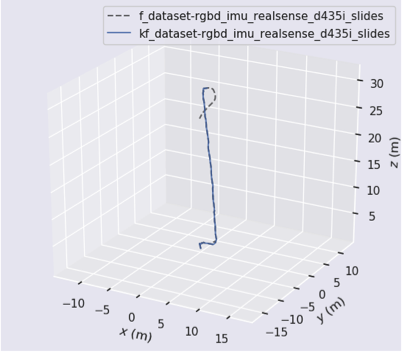 |
| xyz_view | 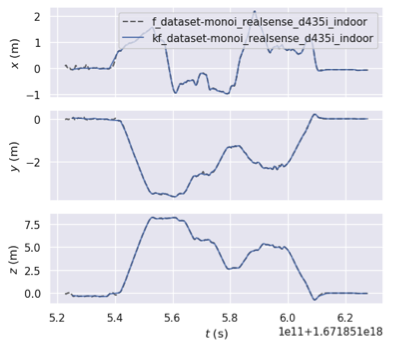 | 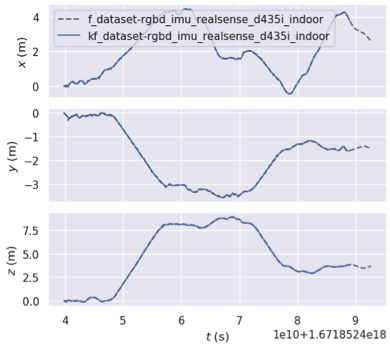 |
 | 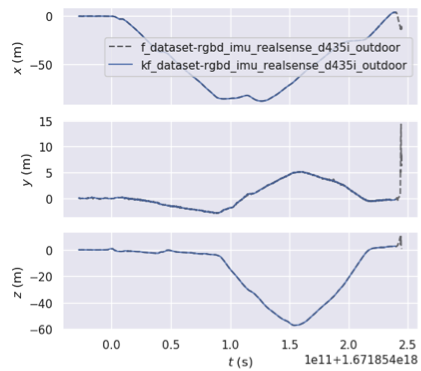 |
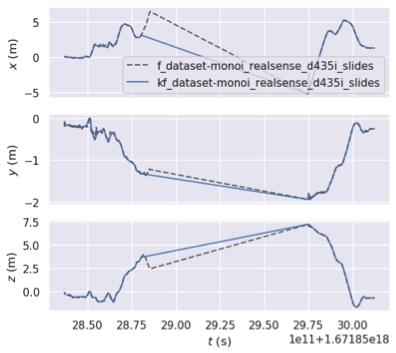 | 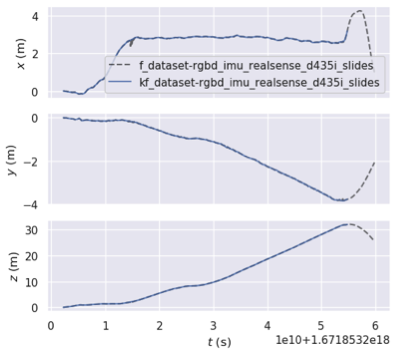 |
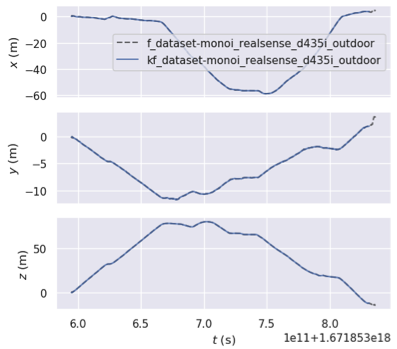
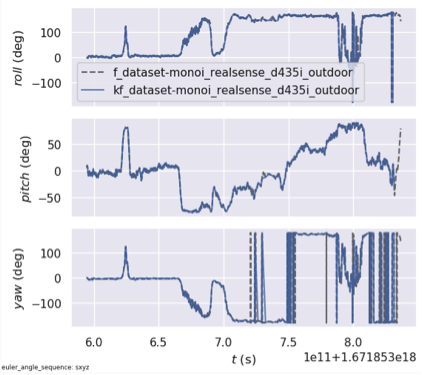
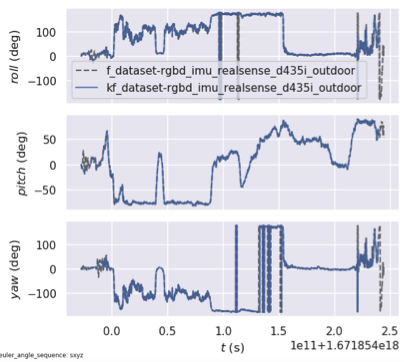
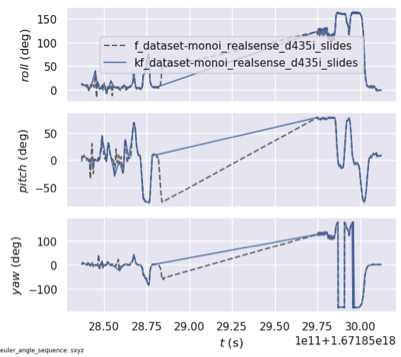
| rpy_view | 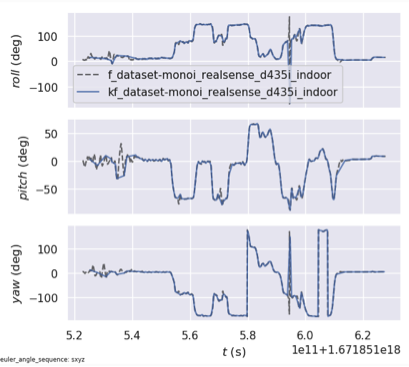 | 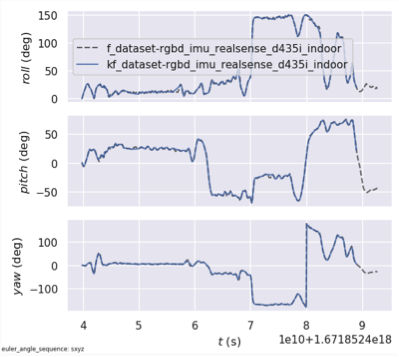 |
 |  |
 | 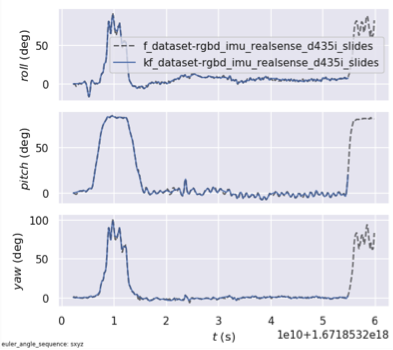 |
| APE | 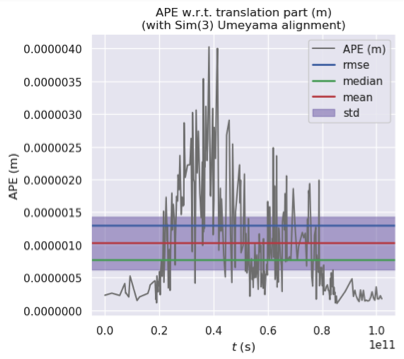 | 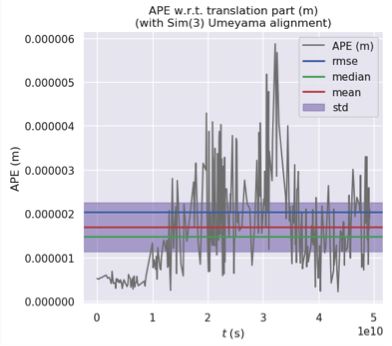 |
 |  |
 |  |
| APE-Map | 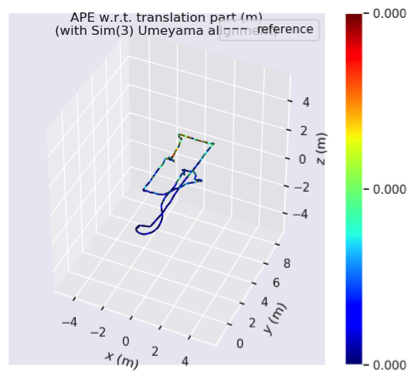 | 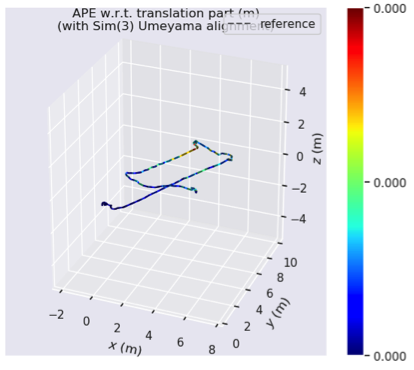 |
 |  |
 |  |
| RPE | 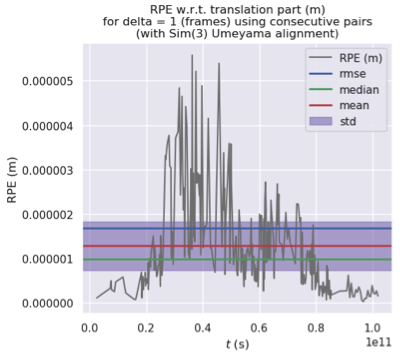 | 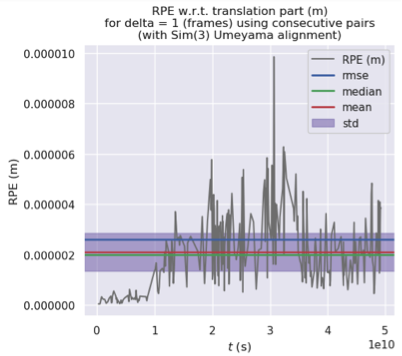 |
 |  |
 |  |
| RPE-Map | 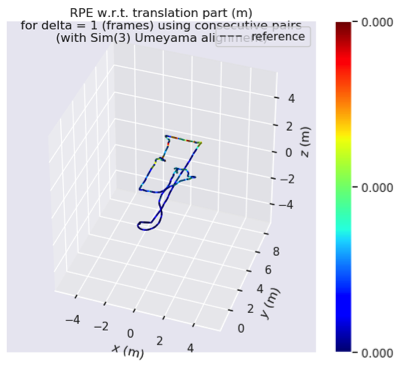 | 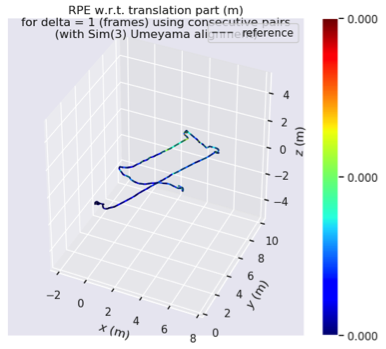 |
 |  |
 |  |
5.结论
1.infrared-camera整体效果好于rgb-camera,其中rgb-camera运行过程中,会出现的问题:
(1) 跳帧(找不到当前活跃地图current active-map就跳回原点、随机初始化角度方向,重画跟踪轨迹):存在多次。bad case触发条件: 场景移动变化过快(>1m/s)、场景过于相似(走廊翻转180°);
(2) 卡顿(图像帧卡住, 无法活动轨迹):存在少量,停下重新移动camera会继续运行;而infrared-camera较流畅,不会出现上述问题。
2.场景对比:
(1) 轨迹完整度:室内>室外>走廊;
- 室内、室外:整体轨迹保留比较完整,虽然在运行过程中会出现卡顿、跳帧,但最终轨迹结果是完整的;
- 走廊:infrared-camera没有丢失轨迹,rgb-camera丢失部分轨迹;
(2) 轨迹总体误差:走廊>室外>室内;
四、RealSense D455: rgb & infrared-camera轨迹评估
和RealSense D435i差异不大,此处不再赘述,注意获取准确对应的相机内参。
五、参考文献
[1] ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM, Dec, 2021.
[2] Orb-Slam3源码:https://github.com/UZ-SLAMLab/ORB_SLAM3
[3] RealSense-sdk-2.0:https://github.com/IntelRealSense/librealsense.git